On the left, the C14 EdgeHD (356mm) in use since Sept 2011. On the right, the Meade ACF 10" (254mm) in use earlier.
SATELLITES TRACKING
ADAPTATION OF A TAKAHASHI EM400
On the left, the C14 EdgeHD (356mm) in use since Sept 2011. On the right, the Meade ACF
10" (254mm) in use earlier.
In mid-2009 I have decided to adapt my Takahashi EM400 for
motorized satellite tracking (ISS, space shuttle etc.), in order to take
complete video sequences of nighttime passages. The works have been carried out
in two steps:
- Step 1 : visual tracking with a finder
- Step 2 : autoguiding
Below, the EM-400 mount modified for step 1. A digital control box (hooked on the left leg of the tripod) controls the mount up to 2°/s while receiving the orders from the radio double joystick (one for right ascension, the other for declination). When this box is not connected or is off, the mount behaves as a standard EM-400. Tracking is performed visually with the help of a finder with cross-hair reticle. Design and manufacturing of this electronic modification (more tricky than expected) are the work of Emmanuel Rietsch (photo on the right, contact: emmanuel.rietsch@free.fr). The acquisition of the images on the Schmidt-Cassegrain is performed by a Lumenera Skynyx L2-2 video camera.

Despite this performing tracking system and hours of training on airplanes passing in the sky, keeping the space ship inside a sensor of a few millimeters at a focal length of 5000 mm and a speed over 1°/s needs a lot of concentration and training. Since October 2010, the mount is autoguided, with the help of a DMK 31AF03 Firewire video camera mounted on the finder (FL 200 mm) and of the software Videos Sky made by Emmanuel and modified by Emmanuel and myself for fast tracking with the EM400. Autoguiding and acquisition are carried out by a HP Pavilion dv8 laptop with double hard drive (one of which is a SSD - Solid State Drive - made with flash memory), the precision of tracking being about one arc minute.
Below, a real time video sequence of the capture of the ISS by the autoguiding system (15 images/s), at a speed of 1°/s (images reduced by 50%). The field of the DMK is about 1° and the small rectangle in the center represents the field of the main acquisition camera. Initially, the mount is still, it is positioned slightly ahead of the trajectory of the ISS with the help of a second finder and it is waiting for the entry of the ISS on the autoguider sensor.
Below, the real time video sequence of the same passage of the ISS, by bad seeing (the fading at the end of the sequence is caused by the entry of the ISS in the shadow of the Earth). The raw images have been registered.
Below, the same sequence accelerated 3 times, processed with stacking of images by group of 10, sharpening by wavelets and adjustment of low levels.
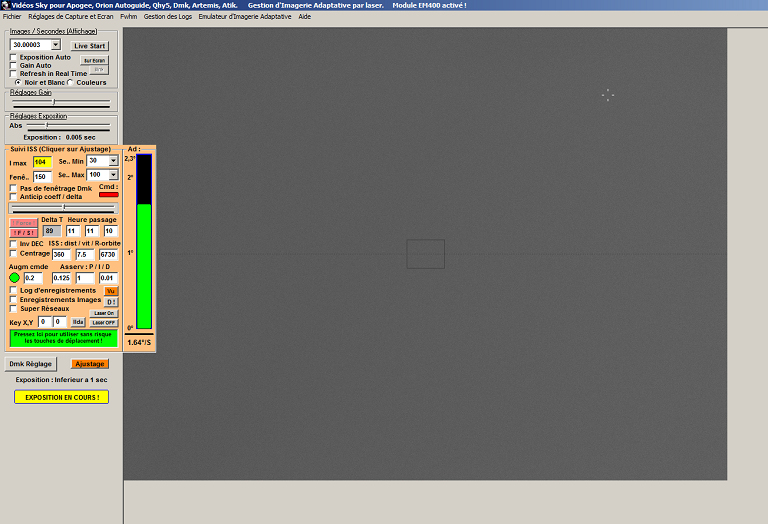
Below, a screen copy of Videos Sky with the EM400 satellite tracking parameters: